



原創 馬鳳翔
摘 要
將激光雷達安置于坐標原點,利用激光雷達測定平面上目標點坐標(r,θ),實現對目標點的定位。為了避免激光雷達測量上的視野盲區,設置激光雷達在平面上 360° 旋轉對空間進行掃描捕獲目標點,為了消除激光雷達位于一固定點對目標點的定位,導致定位測量上數據的單一性,將激光雷達置于一移動平臺,構建動態坐標系,測量與平臺同平面目標點相對激光雷達位置的坐標(ri,θi),通過坐標轉換,將多次測量的坐標平均值作為目標點的定位坐標值,實現對平面上特征點的定位,最后利用 MATLAB 進行數據處理繪圖。
關鍵詞 激光雷達;掃描;移動平臺;定位
Abstract The lidar is placed at the coordinate origin, and the coordinates of the target point on the plane are measured by the lidar to realize the positioning of the target point. In order to avoid the blind area in lidar measurement, the lidar is set to scan and capture the target points by 360° rotation on the plane. In order to eliminate the location of the lidar at a fixed point to the target point, resulting in the single data in the positioning measurement, the lidar is placed on a mobile platform, and a dynamic coordinate system is constructed to measure the target point relative to the lidar in the same plane of the platform Through coordinate transformation, the average value of coordinates measured many times is taken as the positioning coordinate value of the target point, so as to realize the positioning of the feature points on the plane. Finally, the data processing and drawing are carried out by using MATLAB.
為了描述空間物體的運動狀態,需要確定其位置,對其定位,為此我們借用數學方法,建立坐標系,以坐標確定空間某點的位置,實現定位。空間定位無論是軍事上的精準打擊,還是民用上對目標的確定都有極其重要的意義和應用價值。本文利用激光雷達測距的原理,實現對平面上某點的定位。
1 激光雷達定位原理與方法
1.1 激光雷達測距原理
激光雷達是一種以激光作為載波探測目標位置的電子設備。激光雷達由發射模塊、接收模塊和信號處理模塊三部分組成。激光雷達測距的基本原理是激光信號由發射模塊發送出去,經過光學系統到達目標物,接收模塊接收來自目標物的反射激光回波信號,在信號處理模塊,回波經過處理進入到檢測系統,最后獲得目標物的距離信息。即
其中,L 是目標物的待測距離值,c 是空氣中的光速,t 是發射接收往返期間時間值。
1.2 激光雷達定位原理與方法
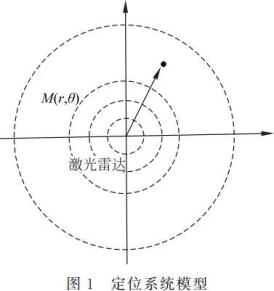
在平面上確定坐標原點建立極坐標系,那么定位平面上任意一點 M 的位置,需要知道 M 的坐標(r,θ),即 M 點到原點的距離以及與坐標軸的方位角,這樣通過得到 M 點相對坐標系原點的位置信息而達到對 M 點的定位。
文中以激光雷達為中心,即坐標原點,利用激光雷達測距,同時記錄掃描角度,所獲得的目標點距離標準位置(激光雷達)的角度和距離的信息,經過坐標轉化,將極坐標系中的(r,θ)轉化為直角坐標系中的(x,y)。此過程為一次測量流程,為了提高定位精度,通過多個標準位置(即激光雷達不同位置為中心)對目標點位置測定,實現多次測量確定目標點位置。具體定位系統模型構建如圖 1 所示:坐標原點 O 為激光雷達的位置,· 為目標點即待定位點 M 所處位置,激光雷達在坐標原點進行 360° 全方位旋轉掃描,發射端對環境發射激光束進行采樣,同時接收端接收從目標點反射回來的信號,信號處理端將接收信號與發射信號進行比較、檢測、處理,最后根據匹配結果[1],獲得目標點 M 的位置信息(r,θ),經過坐標變換 x =r sinθ,y =r cosθ,得到點 M(x,y)。
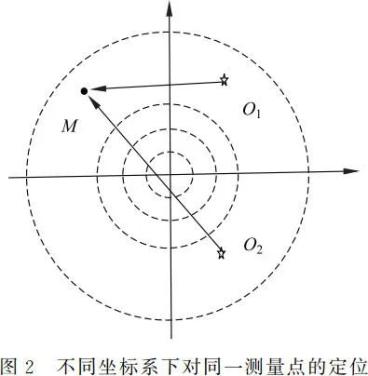
實驗中,為精確得到 M 的空間坐標,將測量系統激光雷達安置于一移動平臺——可自由移動的平板小車上,車載激光雷達所處位置是定位系統坐標原點,這樣就建立了一個以激光雷達為坐標原點的可移動的動態坐標系,位于移動小車上的激光雷達在不同位置對測量點的定位數據,就是一系列以激光雷達所處不同位置為坐標原點的不同坐標系下的對同一測量點的定位數據,如圖 2 所示,激光雷達在位置 O 1 時,即 O 1 對點 M 定位測量,獲得 M 1(r 1,θ 1),激光雷達移動到位置 O 2 時,即 O 2 對點 M 進行第二次定位測量,獲得 M 2(r 2,θ 2),類推獲得激光雷達移動到位置 Oi,即 Oi 對同一采樣點 M 的 i 組測量定位數據 M i(ri,θi),應用 MATLAB 進行數據處理,將以 Oi 為坐標原點的坐標系下的定位測量數據 M i(ri,θi)轉換為以 O 為坐標原點的坐標系下的 M(ri,θi),再取以 O 為坐標原點的坐標系下的 i 次測量值 ri 和 θi 各自的平均值作為以 O 為坐標原點的坐標系下的 M(r,θ)。即
最后為達成實時定位的目的,顯示環節可以應用 frame Grabber 進行成像,實現在電腦上建圖并定位。
這里需要說明的是,M(r,θ)是相對于 O 點的被定位點,為了便于描述,稱 M(r,θ)為 O 系下定位點 M 點的位置,同理,稱 M i(ri,θi)為 Oi 系下 M 點的位置,為了將 Oi 系下的M i(ri,θi)的坐標值轉換為 O 系下的坐標值,需要確定 Oi 在 O 系下的坐標值,即移動的激光雷達在定位過程中自身的位置的確定。
下面是 Oi 在 O 系下位置的確定:首先在 O 系下,激光雷達位于 O 點,除了對目標點 M 進行定位外,根據待測地理環境條件,選取 i 個特征點即 Oi 對其定位,得到 Oi 在 O 系下坐標值 Oi(ri,θi),然后驅動小車使得激光雷達位于 Oi 再次以 Oi 為坐標原點對目標點 M 進行定位,得到 Oi 系下 M 點的定位坐標 M i(ri,θi),通過坐標轉換得到 O 系下激光雷達位于 Oi 時的位置坐標 M(ri,θi)。
2 儀器與裝置
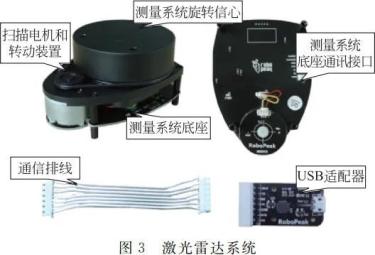
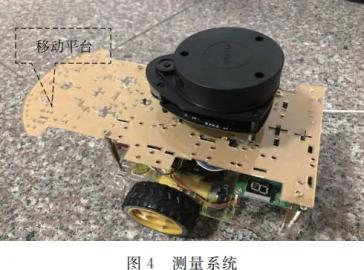
激光雷達以及其各個部件構成如圖 3 所示,激光雷達安置在移動平臺上,整個測量系統如圖 4 所示。驅動小車將激光雷達輸送到測量位置后,啟動雷達掃描,對目標點進行 360° 全方位旋轉掃描開始測量。
3 數據測量與分析
3.1 測量系統定位準確性驗證
測量系統定位是否準確是由其對所測點 M 到激光雷達的距離即以激光雷達為圓心的半徑 r 和方位角 θ 的測量的準確性共同決定的。為了檢驗測量系統測距和方位角測量的準確性,在一平面上繪制極坐標,對測量系統分別進行測距和測角兩種情況驗證。
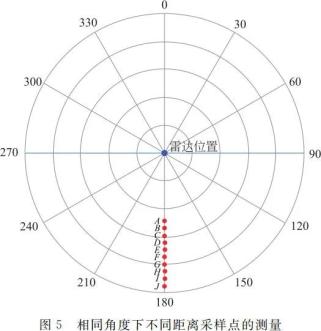
1) 相同角度下不同距離采樣點的測量
取一張繪圖紙,在繪制好的極坐標平面上選取標號為 A,B,C,D,E,F,G,H,I,G,K,L,I,J 共 10 個點,它們的方位角均為 180.0°,如圖 5 所示。測量上述 10 個點與坐標原點即激光雷達的距離,對照為平面極坐標中以毫米尺所測距離為實際距離,計算測量值相對實際值的誤差,測量結果如表 1 所示。

從表 1 可見,10 個樣點的測量結果每次測量值與實際值的差距均略大于 20mm,本實驗所購激光雷達的最佳測量范圍為 5~12m,受繪制坐標紙張面積所限,所選取的采樣點距離均小于 5m,不在激光雷達最佳測量范圍之內,應該是導致測量誤差較大的主要原因,從測量結果也可以發現隨著測距的增加(A 點到 J 點),相對誤差越來越小,如果待測點在 5~12m,估計實際距離與測量距離的差距和相對誤差應該更小,測量效果會更好。
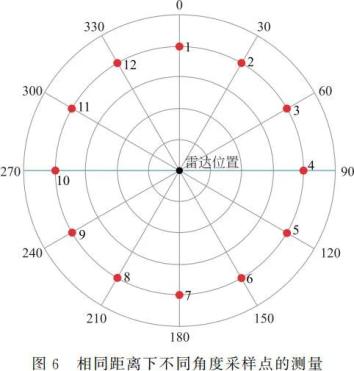
2) 相同距離下不同角度采樣點的測量
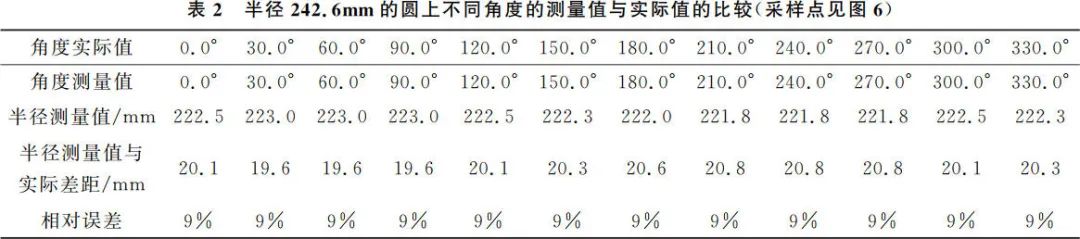
如圖 6 所示,選取標號為 1~12 的 12 個相同半徑 r=242.6mm 的采樣點,即激光雷達與 12 個不同采樣點的距離相同,都是 242.6 mm為實際距離,進行距離和角度測量,計算測量值相對實際值的差距及相對誤差,測量數據結果如表 2 所示,角度結果保留小數點后 1 位的情況下,測量可以認為準確,誤差可以被忽略,測量距離與實際值之間的差距在 20mm 范圍擺動,測距相對誤差保留一位有效數字時為 9%,12 個采樣點一致。結合不同距離,相同角度下測量值與實際值的差距略大于 20mm(表 1),說明定位系統的誤差主要來源于距離測量,方位角相對距離對定位結果的影響可以忽略不計。
3.2 對采樣點動態測量
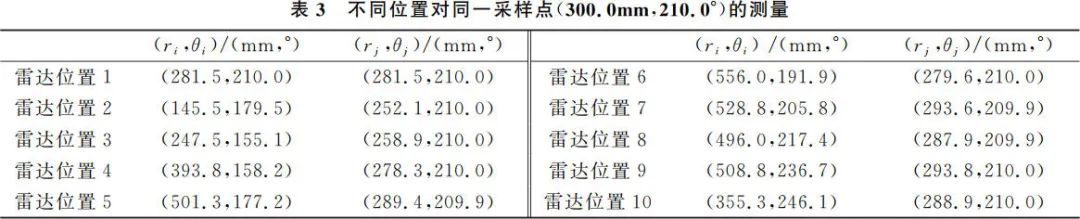
激光雷達位于不同位置對同一點 M(300.0,210°)(距離單位 mm,角度單位度°)進行定位。M 點和激光雷達位置如圖 7 所示,雷達位置 1 為定位系統的坐標原點,(ri,θi)為激光雷達在位置 i 對固定點 M 的第 i 次測量時點 M 以激光雷達所處位置為坐標原點時的極坐標,(rj,θj)為激光雷達在位置 i 時,以 i 為坐標原點對 M 點所測到的坐標值(ri,θi)平移為已確定定位系統下的坐標值,即圖 7 中以雷達位置 1 為定位坐標原點的坐標值。
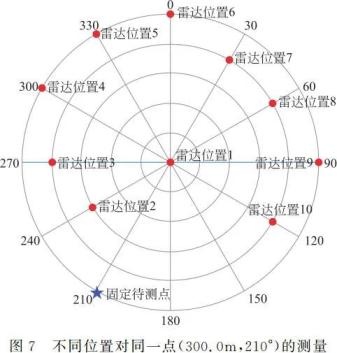
圖 7 雷達位置 1 為定位系統坐標原點,激光雷達在 10 個不同位置對 M 點進行定位,結果如表 3 所示。取 10 次測量值的坐標經過平移后的平均值
,作為 M 點相對于定位系統雷達位置 1 的定位。計算結果如下:
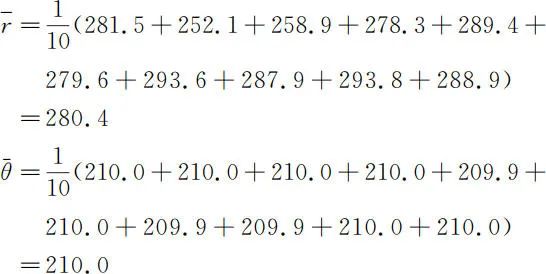
所以經過測量系統定位的 M 點的坐標為 M(280.4mm,210.0°)。定位點實際坐標 M(300.0mm,210.0°),測距誤差 Δr=300.0-280.42≈20mm,角度誤差為 0,與前面相同角度下不同距離采樣點的測量以及相同距離下不同角度采樣點的測量的驗證結果相符,定位誤差主要來自測距,約 20mm。
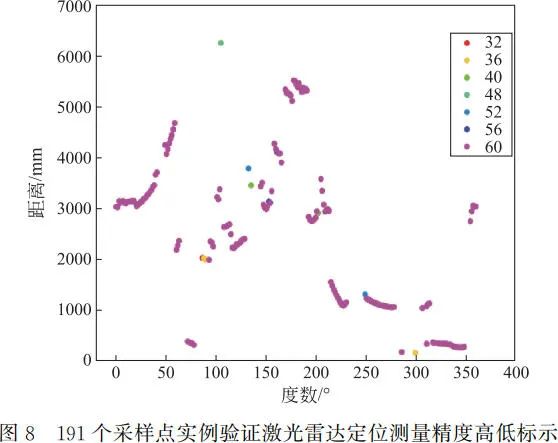
3.3 實例驗證激光雷達空間定位能力
對該定位系統實例驗證,將定位測量系統置于北林某教室的一個桌面上,對其周圍物體——高于桌面的椅背 191 個樣點進行定位(測量數據較為龐大,略去)。MATLAB 繪制測量樣點(距離-角度-精度高低)分布圖,如圖 8 所示。圖中數字表示測量精度高低,數字由小到大表示測量精度由低到高。例如角度(Angle)為 104.4°時,樣點距離為 6258.5mm,精度數字標識 48。精度數字也就是激光雷達的強度,對于每個采樣點,就是激光雷達回波的強度,一定程度上反映被掃描點的反射率,這個值越大,測量定位越好,精度越高。
4 結語
本測量系統可以較好地實現對空間樣點實時定位;因為受到對照坐標系平面構建限制(小于 5m),不在所購激光雷達有效測距的范圍之內,定位距離誤差均在 20mm 附近,可對測量系統進行校正,校正公式可以表達為 ρ =ρ測-c,c 由所購激光雷達確定,本定位系統中 c =20mm,定位角度誤差為 0,精度高,效果好。
5 創新與拓展
目前,測距的方式多樣,常見的是超聲波測距與激光測距。與激光測距相比,發散角為超聲波測距中超聲波傳感器的固有屬性,對超聲波傳感器的實際測距精度[2]有一定影響,采用激光測距避免了因超聲波波束發散所造成的障礙物較遠時超聲波傳感器方向定位精度較差的缺點。不過激光雷達在發射系統和接收系統之間隨著測量距離增大會存在視野盲區[3],將激光雷達 360° 掃描,消除靜態測量時出現的視野盲區。
激光雷達測距,因距離不同影響測量數據的精度[4],引入移動平臺裝置后,建立了動態坐標系,獲得不同位置下對同一采樣點的多組測量數據,消除了激光雷達固定在一個位置時,靜態測量所存在的一點定位測量數據單一的缺陷,實現了不同方位對同一點的定位;同時也消除了激光雷達因位置不同采樣強度影響測量數據的精度。
如果將移動平臺調換為一可在空間自由升降的裝置,將激光雷達安裝在此裝置上,例如無人機,通過測量升降裝置的高度,則可以實現空間三維定位和成像。
應用 MATLAB 進行數據處理和繪圖,直觀體現激光雷達定位的數據意義。
可以應用 frame Grabber 進行成像,實現電腦上實時定位建圖。
參考文獻
[1]張杰. 激光雷達原理系統軟件設計[D]. 西安: 西安電子科技大學, 2010.
[2]穆衛誼, 張廣鵬, 黃玉美, 等. 移動機器人的超聲波傳感器發散角標定及應用[J]. 儀器儀表學報, 2017, 38(3): 564-565.
MU W Y, ZHANG G P, HUANG Y M, et al. Calibration and application of ultrasonic sensor beam angle for mobile robots[J]. Chinese Journal of Scientific Instrument, 2017, 38(3): 564-565. (in Chinese)
[3]張一鳴. 超聲波測距盲區研究的探討[J]. 電腦知識與技術, 2020, 16(12): 256-258.
ZHANG Y M. Discussion of the research on the blind zone of ultrasonic ranging[J]. Computer Knowledge and Technology, 2020, 16(12): 256-258. (in Chinese)
[4]陳兆東. 高距離精度條紋探測和單光子計數復合激光三維成像研究[D]. 哈爾濱: 哈爾濱工業大學, 2019.
作者簡介: 馬鳳翔,女,北京林業大學副教授,主要從事大學物理、大學物理實驗、電磁場理論的教學與研究,以及物理學在林學中的應用與研究工作,mafengxiang@bjfu.edu.cn。
引文格式: 馬鳳翔. 基于激光雷達平面實時定位研究[J]. 物理與工程, 2022, 32(1): 126-130.
Cite this article: MA F X. Research real time positioning on planar based on lidar[J]. Physics and Engineering, 2022, 32(1): 126-130. (in Chinese)
轉載請注明出處。


 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們